
Об'єднаний датчик встановлений на лівій стороні важеля гальма стоянки (моделі з лівим розташуванням рульового управління) або на правій стороні важеля гальма стоянки (моделі з правим розташуванням рульового управління) і визначає кутову швидкість нишпорення автомобіля (кутова швидкість автомобіля в повороті) і поздовжнє прискорення. Датчик передає сигнал DSC HU/CM.
Вихідна напруга об'єднаного датчика (2.5 в, коли автомобіль нерухомий) змінюється відповідно до кутової швидкості нишпорення і величиною поздовжнього прискорення.
Кутова швидкість нишпорення визначається, коли датчик визначає силу Коріоліса, пропорційну швидкості обертання.
Величина поздовжнього прискорення визначається, коли датчик визначає силу інерції, пропорційну поздовжньому прискоренню, що діє кремнієвий чутливий елемент.
Примітка.
- Сила Коріоліса.
- Коли об'єкт, розташований на диску, що обертається, переміщається до його центру, генерується сила, спрямована під прямим кутом до траєкторії переміщення об'єкта.
- Це призводить до того, що напрямок переміщення об'єкта залишається незмінним щодо точки відправлення, і об'єкт не досягає центру.
- Ця сила, що відхиляє об'єкт від центру, називається силою Коріоліса, а фактичне переміщення об'єкта прямолінійним.
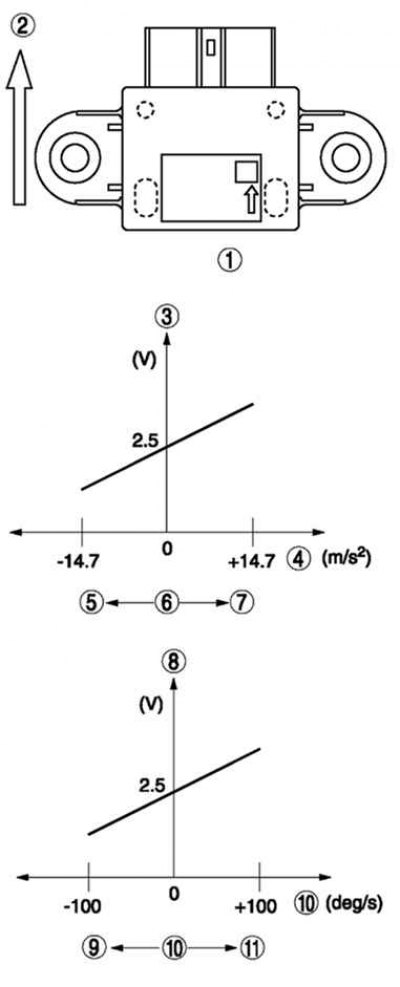
Мал. 6.10. Схема роботи об'єднаного датчика керування динамічною стійкістю автомобіля Мazda 6: 1 – зовнішній вигляд; 2 – передня частина автомобіля; 3 – вихідна напруга; 4 – прискорення; 5 – лівий поворот; 6 – поздовжнє прискорення; 7 – правий поворот; 8 – вихідна напруга; 9 – лівий поворот; 10 – кутова швидкість нишпорення; 11 – правий поворот